


- [Unterstützung für Multi-Ökosystem mit Matter] Ein Aqara Zigbee 3.0 Hub ist erforderlich (außer Kamera-Hub G2H) und separat erhältlich. Aqara Rauchmelder unterstützt Homekit, Alexa, SmartThings und Google Home.
- [85dB-Sirene & LED-Anzeige] Der Aqara Rauchmelder ist mit einer robusten 85dB-Sirene ausgestattet, die laut genug ist, um Sie zu alarmieren, auch wenn Sie sich in einem anderen Raum befinden, schlafen oder von Lärm umgeben sind. Während des Alarms blinkt außerdem eine helle LED-Anzeige, die einen klaren visuellen Hinweis gibt.
- [Vernetzung mehrerer Geräte] Sie können mühelos ein Netzwerk aus mehreren Rauchmeldern in Ihrem Haus einrichten. Wenn ein Aqara Rauchmelder eine Gefahr erkennt, lösen alle angeschlossenen Melder ihren Alarm aus, so dass Sie unabhängig von der Größe Ihres Hauses immer gewarnt werden. (Hinweis: Diese Funktion ist nur innerhalb des Aqara Home Systems verfügbar).
- [Ultralange Akkulaufzeit] Ausgestattet mit fortschrittlichen Batteriespartechnologien und einer Hochleistungsbatterie, bietet der Aqara Rauchmelder eine beeindruckende Lebensdauer. Das bedeutet, dass Sie langfristig Ruhe genießen können, ohne sich mit häufigem Batteriewechsel herumschlagen zu müssen. Die geschätzte Batterielebensdauer basiert auf Tests bei 25 °C, 50–65 % Luftfeuchtigkeit und einem 5-minütigen Alarm alle 30 Tage über Aqara Home. ✽【HINWEISE】Drittanbieterplattformen können den Stromverbrauch erhöhen und ungenaue Batteriestände anzeigen. Für genaue Messwerte verlassen Sie sich bitte auf die Anzeige von Aqara Home und die tatsächliche Nutzung.
- [Sofortige Benachrichtigungen & intelligente Automatisierungen] Der Aqara Rauchmelder überwacht den Rauchpegel und sendet sofort Benachrichtigungen in Echtzeit an Sie und Ihre Familie. Er lässt sich in die Aqara Home app integrieren, so dass Sie benutzerdefinierte Automatisierungen und Alarme einstellen können. Sie können auch die Benachrichtigungseinstellungen und Deaktivierungsoptionen personalisieren, um Ihr intelligentes Zuhause noch effizienter und sicherer zu machen.
Hallo meine lieben Freunde des gepflegten Kabelsalats,
heute mal ein Beitrag abseits von Haussteuerung und co., aber dennoch mit Raspberry Pi und Arduino. Und zwar möchte ich euch einmal zeigen, wie Ihr auf relativ einfach Weise Rundenzeiten von einzelnen Quadrocopter in einem FPV-Rennen messen könnt.
Wie einige von Euch sicherlich wissen, beschäftige ich mich in meiner Freizeit gerne mit RC-Modellbau und aktuell vor allem mit Quadrocoptern. Da wir auch öfter mal mit mehreren fliegen entstand so die Idee auch einmal Rennen zu veranstalten.
Ich wäre nicht ich, wenn ich dabei nicht nach einer Möglichkeit gesucht hätte, das auch direkt zu automatisieren. Und dafür habe ich auch wirklich eine relativ einfache Lösung gefunden, welche ich euch nicht vorenthalten möchte.
Arbeitsweise
Das Herzstück des Projekts ist der Raspberry Pi auf dem das System RotorHazard eingerichtet werden muss. An dem Pi werden je Kanal den man tracken möchte ein Arduino mit einem angeschlossenen 5.8GHz Empfänger über die I2C Schnittstelle verbunden. Der Pi zeichnet dann während des gesamten Rennens die Signalstärke jeder Drohne auf und speichert die Daten in einer Datenbank.
Anhand der gemessenen Signalstärke des jeweiligen Kanals werden dann die Rundenzeiten der einzelnen Piloten ermittelt. Die so ermittelten Rundenzeiten können selbst im Nachhinein noch neu justiert und somit korrigiert werden, falls der Sensor vor Start des Rennens nicht korrekt konfiguriert war.
Die Platine
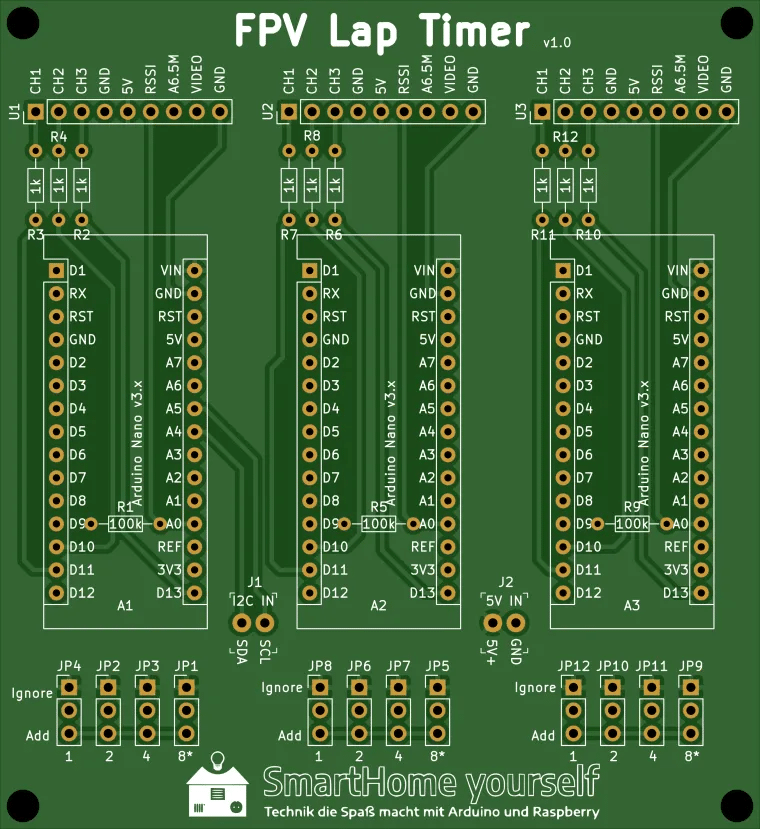
Natürlich habe ich für das Projekt auch gleich eine Platine entworfen. Diese ist kein muss, macht den Aufbau des Projektes aber um einiges einfacher und sieht am Ende mMn. sauberer aus.
Die bestückte Platine wird einfach mit den I2C Pins sowie einem 5V- und GND-Pin des Raspberry Pi verbunden.
Am besten konfiguriert man die I2C Adressierung im Sketch der einzelnen Nodes. Wer aber lieber die Hardware-Seitige Konfiguration verwenden möchte kann dies über die vorgesehenen Jumper-Steckplätze unter den Arduinos erledigen. Die Jumper haben die Werte 1,2,4 und 8 wobei 8 noch nicht in der Software vorgesehen ist (aber ggf. noch kommt).
Diese werden auf addiert. Heist wenn Ihr Eurer Node die ID 5 geben wollt, setzt Ihr die Jumper bei 1 und 4 auf „Add“. Die Jumper bei 2 und 8 stehen dann auf „ignore“. Die IDs dürfen am I2C Bus nicht doppelt vorkommen!
🛒 Diese Platine kannst du direkt bei ELECROW bestellen
Mit dem Partnerlink unterstützt du mein Projekt – ganz ohne Mehrkosten für dich.

Das Gehäuse
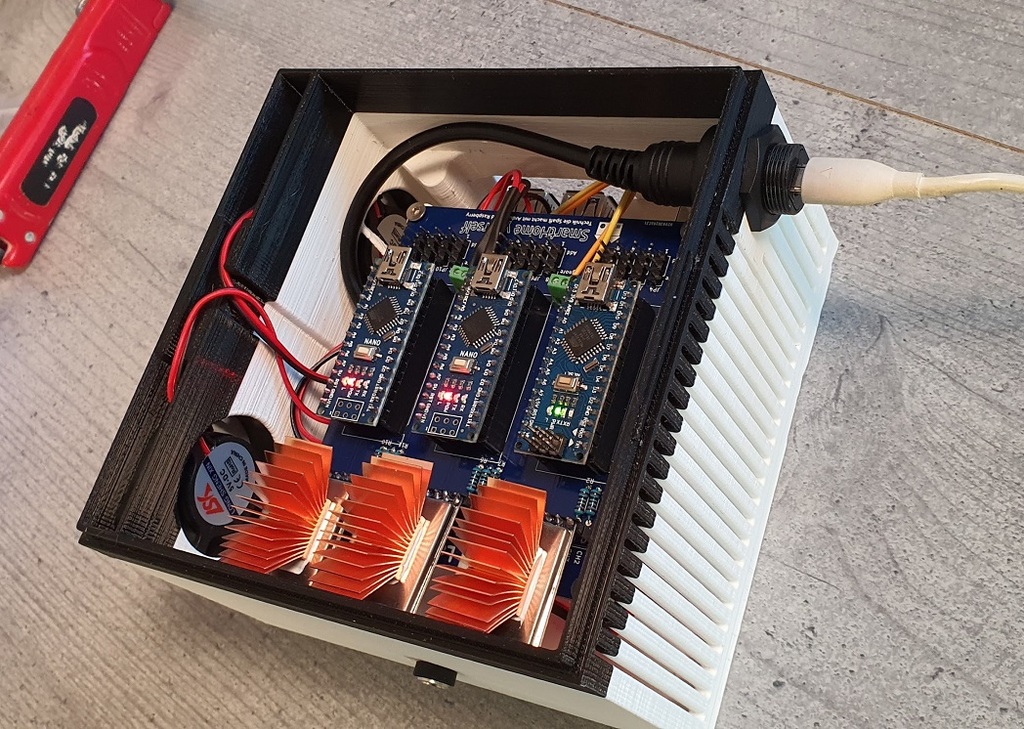
Gerade auf dem Feld kann man die Platine natürlich nicht frei herumliegen lassen. Also benötigt man hier auch noch ein Gehäuse, welches ich passend zur Platine direkt mit entworfen und auf Thingiverse für Euch hochgeladen habe.
Die STL-Dateien für den 3D Drucker findet Ihr unter folgendem Link:
https://www.thingiverse.com/thing:4922537
Software

Als Software habe ich bei diesem Projekt RotorHazard eingesetzt. Dabei handelt es sich um eine Software die auf dem Raspberry Pi arbeitet, alle Daten in einer Datenbank speichert, diese Daten auswertet und die Benutzeroberfläche als Webseite bereitstellt.
Das System bietet so ziemlich alles, was man benötigt um ein FPV Rennen durchzuführen. Neben dem tracken der Rundenzeiten bietet es viele weitere Funktionen rund um das Renn-Management von FPV-Rennen. Ihr könnt eure Piloten hinterlegen, die Piloten in Teams aufteilen oder einzeln antreten lassen. Des weiteren bietet das System viele frei konfigurierbare Arten von Renn-Modi. Ihr könnt Euer Rennen also genau an eure eigenen Bedürfnisse anpassen.
Sofern mehr Piloten als Sensoren am Rennen teilnehmen wollen, könnt Ihr diese in Heats mit der Maximal-Anzal entsprechend der Sensoren unterteilen. Diese gehen dann einzeln an den Start und die Rennergebnisse aller Heats werden im Anschluss gemeinsam ausgewertet und der Gesamtsieger ermittelt.
Weitere Informationen zum RotorHazard System findet Ihr im GitHub Repository:
https://github.com/RotorHazard/RotorHazard
Verwendete Bauteile
In der folgenden Liste findet Ihr noch einmal die wichtigsten im Projekt verwendeten Bauteile, falls Ihr das System nachbauen möchtet.
| Produktname | Preis | |
|---|---|---|
 | 47,77 € | |
 | 29,99 € | |
 | -- | |
 | 14,99 € | |
![Silverbead Wärmeleitkleber Thermal Glue Adhesive [SG100XS] [30g] Wärmeleitpaste klebend | geeignet für Heatsinks Kühlkörper LED VRAM VRM SMD CPU GPU SMD IC SSD Chipsatz Steuerplatinen und Elektronik](https://m.media-amazon.com/images/I/41XJv0AlDgL._SL160_.jpg) | 14,90 € | |
 | 11,96 € | |
 | 13,08 € | |
 | 3,30 € | |
 | -- | |
 | 8,79 € | |
 | 2,89 € | |
 | 2,99 € | |
 | 14,99 € |
Benötigte Stückzahlen:
1x Raspberry Pi 3
3x Arduino Nano
3x 5.8GHz Empfänger (RX5808)
3x Kühlkörper
2x Lüfter 40x40x10
1x USB-Gehäusebuchse
1x Wärmeleitkleber
9x 1k Widerstand
3x 100k Widerstand
1x Din-Buchse
1x Din-Stecker
1x WS2812B LED Stripe
einige Buchsenleisten/Headerpins
Video zum Projekt „Rundenzeiten von FPV-Rennen messen“
Sollten trotz des Tutorials noch Fragen zum Projekt „Rundenzeiten von FPV-Rennen messen“ aufkommen, schaut einfach auf unserem Discord vorbei. Dort kann euch sicher bei eurem Problem geholfen werden!
https://smarthomeyourself.de/discord
Ich wünsche euch viel Spaß beim nachbasteln und sag einfach bis zum nächsten Video.
Tschau
Euer Daniel